Optique géométrique
Focométrie
La focométrie est la détermination expérimentale des éléments cardinaux d'un système optique.
Les méthodes utilisables sont nombreuses de mise en œuvre et de précision variées et il convient de choisir la plus adaptée aux besoins.
Méthodes rapides
Sphéromètre des lunetiers
L'expression de la vergence d'une lentille mince est donnée par : 
La mesure des rayons des faces permet donc de déterminer la valeur de la vergence. On peut utiliser un sphéromètre à trois pointes A, B et C appliqué sur la surface sphérique. La pointe centrale C est reliée à un comparateur qui permet de mesure la flèche (distance entre C et la droite AB de longueur L). Si cette flèche est petite devant le rayon de courbure elle vaut L2 / R. Elle est proportionnelle à 1 / R.
Comme les verres de lunettes ont des indices voisins de 1,5, il est possible de graduer le comparateur directement en dioptries. La graduation est négative pour les faces concaves et positive pour les faces convexes.
On applique l'appareil sur les deux faces du verre et on fait la somme algébrique des indications pour obtenir la vergence globale. La précision est de l'ordre de 0,1 dioptrie.
Méthode de neutralisation
Pour déterminer la vergence d'une lentille, on lui accole une lentille opposée de manière à obtenir un ensemble équivalent à une lame à faces parallèles.
 |
La recherche de la bonne lentille qui assure la neutralisation est facilitée par la remarque suivante : |
Fronto-focomètre
Ce dispositif connu sous le nom de frontofocomètre est utilisé par les lunetiers pour mesurer la distance focale des verres de lunettes.
Description :
L'appareil comporte une source lumineuse (non représentée) un collimateur de distance focale f1 figuré par la lentille L1 et d'une lunette de visée réglée sur l'infini. Seule la lentille L2 de l'objectif de distance focale f2 est représentée. L'oculaire de cette lunette permet de grossir l'image qui se forme dans le plan focal image de L2.
Le collimateur forme l'image A d'une mire M mobile.
Fonctionnement :
La lentille Lx de vergence Vx à étudier de focale Fx est placée au foyer image de L1.
Fx donne de A une image B et L2 donne de B l'image finale C.
Le réglage consiste à amener l'image C dans le plan focal de L2 en déplaçant la mire M. Si cette condition est réalisée c'est que l'image B est à l'infini et donc que l'image A est située dans le plan focal de Lx.
F1 et F'1 sont les foyers de L1.
La relation de conjugaison de L1 avec origines aux foyers (formules de Newton) donne : F1M.F'1A = − f12.
Quand le réglage est réalisé F'1A est égal à la valeur algébrique de Fx.
Donc xm = F1M = − f12 / Fx = − f12.Vx
La vergence de la lentille étudiée est donc proportionnelle à la valeur algébrique de F1M. Une fois l'appareil réglé, il suffit de lire Vx sur une échelle graduée.
La précision de la mesure dépend de la qualité du réglage et de la qualité du système de déplacement de la mire. Elle est assez faible pour les petites valeurs de la vergence.
Les frontofocomètres récents affichent automatiquement toutes les caractéristiques d'un verre placé dans l'appareil.
Utilisation :
Le bouton [Nouveau] permet le choix aléatoire par le programme d'une nouvelle valeur de Fx.
Le bouton [Solution] permet d'afficher la valeur de Fx déterminée par le programme.
En glissant le curseur avec la souris, on modifie la position de la mire M. La valeur affichée correspond à la vergence.
Les positions des images A et B sont affichées (quand elles sont dans le cadre) ainsi que le faisceau lumineux issu de M.
Lors des situations extrêmes d'inclinaison des rayons le tracé est suspendu.
Sur le schéma initial il n'est pas évident d'estimer la meilleure position de l'image C. Quand le réglage s'approche de l'optimum, on affiche une vue agrandie des positions de l'écran et de l'image de la mire.
On peut aussi considérer que pour le réglage idéal les bords du faisceau entre Lx et L2 doivent être parallèles à l'axe optique mais à cause des erreurs d'arrondi (xm varie par valeurs discrètes) il n'est pas toujours possible d'y parvenir.
Méthodes utilisables avec les lentilles minces
Utilisation des relations de conjugaison
A partir de la relation ![]() il est possible de déterminer la valeur de la distance focale à partir de la détermination des position de l'objet, de la lentille et de l'image. La précision est limitée par la difficulté d'apprécier exactement la position de l'image.
il est possible de déterminer la valeur de la distance focale à partir de la détermination des position de l'objet, de la lentille et de l'image. La précision est limitée par la difficulté d'apprécier exactement la position de l'image.
Autocollimation
Sur un banc d'optique, on place un objet lumineux, la lentille à étudier et dans un plan parallèle à celui de la lentille un miroir plan (en cyan et gris). La distance entre le miroir et la lentille est quelconque.
Si la source est confondue avec le foyer de la lentille, tout rayon émerge de la lentille parallèlement à l'axe optique, frappe le miroir et revient sur lui-même : l'image (réelle) se forme dans le plan focal avec un grandissement égal à −1.
Pour tracer les rayons pour une position quelconque de la lentille, on cherche la position de l'image donnée par la lentille (en vert). L'image donnée par le miroir (en jaune) est symétrique par rapport au miroir. Cette image est un objet virtuel (la lumière va alors de la droite vers la gauche) pour la lentille qui en donne une image finale réelle (en orange).
Il faut déplacer la lentille (et le miroir) pour former l'image finale dans le plan de l'objet.
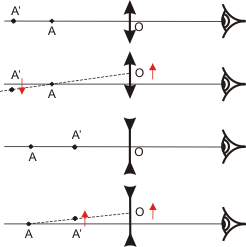
Méthode de Bessel
◊ Cette méthode ne s'applique qu'aux lentilles convergentes.
Avec une lentille convergente de sommet O, on forme sur un écran l'image réelle A' d'un objet réel A.
D'après la relation de conjugaison, on a : OA' = OA.OF' / (OA + OF').
On pose OA = x et D = AA' = AO + OA' = − x2 / (x + f ').
x et D sont liés par la relation x2 + D.x + D.f ' = 0.
On pose Δ = [D.(D − 4.f ')]½.
Si
D > 4.f ', cette équation admet pour solutions O1A = x1 = ½( − D − Δ) et O2A = x2 = ½( − D + Δ).
♦ Pour une distance objet écran D > 4.f', il existe deux positions d'une lentille de distance focale f ' pour lesquelles celle-ci donne en A' l'image d'un objet placé en A.
On pose O1A' = x'1 et O2A' = x'2.
D = − x1 + x'1 = − x2 + x'2 et par suite x'1 = − x2 et x'2 = − x1.
Les positions de la lentille sont symétriques par rapport au milieu de D. On pose d = O1O2
D = AA' = AO1 + O1O2 + O2A' = − x1 + d + x'2
D = AA' = AO2 + O2O1 + O1A' = − x2 + d + x'1
D − d = x'2 − x1 = − 2.x1 = D + Δ
D + d = x'1 − x2 = − 2.x2 = D − Δ
Le produit de ces deux relations donne : (D − d).(D + d) = D2 − Δ2 .
D2 − d2 = D2 − D.(D − 4.f ') =
D.4.f '
Finalement on obtient la valeur de la distance focale de la lentille : f ' =
(D2 − d2) = 4.D
Méthode de Bessel
Sur un banc d'optique, on place un objet lumineux et un écran situé à la distance D de la source. Il existe deux positions de la lentille qui permettent d'obtenir une image nette de l'objet sur l'écran. Ces deux positions sont séparées par la distance d.
S'il est impossible
d'obtenir ces deux positions, il faut augmenter D.
Cette méthode nécessite
quatre pointés. Il faut que D soit assez grand pour que d ne soit pas trop petit afin de diminuer l'incertitude relative sur sa valeur.
Méthode de Silbermann
Cette méthode dérivée de la méthode de Bessel ne s'applique qu'aux lentilles convergentes.
Dans la méthode de Bessel, on a D = − x2 / (x + f ').
La dérivée dD / dx = − x.(x + 2.f ') / (x + f ')2, s'annule pour x = − 2.f ' et pour x = 0.
La valeur x = 0 correspond à l'objet placé sur la lentille et ne présente pas d'intérêt.
La valeur x = − 2.f ' correspond à D = 4.f ' donc à la racine double de l'équation x2 + D.x + D.f ' = 0.
♦ Si D = 4.f ', Il existe une seule position de la lentille
qui permettent d'obtenir une image nette de l'objet sur l'écran.
Remarques :
- Si cette condition est réalisée, A et A' sont les points antiprincipaux de la lentille et le grandissement est égal à − 1.
- On peut noter que pour cette position, la distance objet-image est minimale ce qui facilite le réglage.
Sur un banc d'optique, on place un objet lumineux et un écran situé à la distance D de la source. Il existe deux positions distantes de d de la lentille qui permettent d'obtenir une image nette de l'objet sur l'écran. On diminue la valeur de D jusqu'à ce que ces deux positions soient confondues (d = 0). On mesure alors sur le banc d'optique la distance D objet-image et on déduit f = D / 4. On peut s'aider des deux remarques ci-dessus pour améliorer le réglage.
Méthode de Badal
Un objet source est placé au foyer d'une lentille convergente L1 qui donne une image à l'infini. Une seconde lentille convergente L0 de distance focale f '0 connue donne de cette image une image réelle située dans son plan focal image (image en jaune).
On note, sur le banc d'optique, l'abscisse X0 de ce plan.
On place le sommet de la lentille Lx dont on désire déterminer la distance focale au foyer objet de la lentille L0.
Lx donne de l'objet initial (pour elle situé à l'infini) une image située dans son plan focal image (en vert).
L0 donne de cette image une image finale (en jaune) dans un plan situé à l'abscisse X1.
On pose D = X1 − X0. D est positif pour une lentille divergente et négatif pour une lentille convergente. Dans ce cas, il ne peut pas être supérieur à f '0.
L'application de la relation de Newton appliquée à la lentille L0 donne f 'x = − f '02 / D.
Systèmes épais
Méthode de Cornu
Cornu a mis au point une technique de détermination des éléments cardinaux d'un système épais.
Sur un banc d'optique, on aligne les axes optiques d'un collimateur réglé sur l'infini, le système à étudier et un viseur visant dans un plan de front situé loin devant son objectif.
Le collimateur donne une image à l'infini d'un réticule. Le dispositif est éclairé en lumière monochromatique.
Comme la méthode nécessite de viser sur les faces extrêmes du système ou sur leurs images on dépose un cheveu sur chaque face ou fait une marque au feutre sur des lentilles non traitées.
La méthode consiste à réaliser 6 pointés.
1- On vise sur l'image du réticule : On vise donc dans le plan focal image du système F2.
2- On vise sur la face de sortie S2 du système.
3- On vise l'image I1 que le système donne de sa face d'entrée S1.
Les pointés 1 et 2 donnent la valeur algébrique de S2F2; les pointés 1 et 3 donnent la valeur algébrique de F2I1.
On retourne le système face pour face et on recommence :
4- On vise sur l'image du réticule : On vise donc dans le plan focal objet du système F1.
5- On vise sur la face de sortie S1 du système.
6- On vise l'image I2 que le système donne de sa face d'entrée S2.
Les pointés 4 et 5 donnent la valeur algébrique de S1F1; les pointés 4 et 6 donnent la valeur algébrique de F1I2.
En appliquant les relations de Newton (conjugaison avec origines aux foyers) on tire :
F1S1.F2I1 = − f '2 et F2S2.F1I2 = − f '2 .
Une seule relation suffit pour déterminer la distance focale mais en général on fait la moyenne des deux valeurs ainsi obtenues.
Le signe de la distance focale est obtenu en examinant l'image d'un objet à l'infini à travers le système si elle est droite, le système est divergent.
La connaissance de la position des foyers et de la distance focale permet de positionner tous les éléments cardinaux.
Précision de cette méthode : Elle est en général faible car les images sont souvent de mauvaises qualités et comme on procède par différences, l'incertitude sur chaque valeur peut être importante.
Par exemple un objectif photographique est conçu pour donner de bonnes images d'objets distants. Les images 1, 2 et 5 seront de bonnes qualités par contre les autres seront médiocres.
En glissant le curseur vert avec la souris on déplace le viseur dont la position sur le banc est affichée dans le cadre vert.
La distance entre S1 et S2 est indiquée pour chaque système étudié.
Les cercles noir et jaune figurent l'image obtenue dans le viseur.
L'image est la même pour tous les objets. La qualité des images est supposée identique pour chaque visée.
Pour les courageux qui veulent faire les calculs, les systèmes étudiés sont des doublets :
(Ramsden 3-2-3 ou Huygens 3-2-1) avec a = 10, 8 et 16 cm. (dans le désordre).
Méthode de Davanne et Martin
Cette méthode permet de caractériser un système épais dont les foyers sont réels. Elle est basée sur la recherche de ses éléments antiprincipaux. C'est l'équivalent pour les systèmes épais de la méthode de Silbermann.
Cette méthode est surtout utilisée pour l'étude des objectifs photographiques.
A et A' sont les intersections de l'axe optique avec les plans antiprincipaux (plans conjugués de grandissement − 1), S1 et S2 les positions des faces d'entrée et de sortie du système et F et F' les positions des foyers image et objet.
On a
: d = AA' = AF + FS1 + S1S2 + S2F' + F'A'. On pose e = S1S2.
Dans l'approximation de Gauss, on a la relation algébrique :
2f ' = d − e − FS1 − S2F' (1).
On procède en trois étapes.
1) On place en A un objet dans le plan focal d'une lentille auxiliaire Laux : on éclaire donc le système en lumière parallèle. On déplace un écran pour obtenir un image nette de l'objet : on obtient la position du foyer image S2F'.
2) On retourne le système et on cherche à obtenir une image nette sur l'écran : on obtient la position du foyer objet S1F.
3) On retire la lentille Laux et on déplace le système centré et l'écran jusqu'à obtenir une image inversée de l'objet. L'image est dans le plan antiprincipal image A'. On déduit la distance focale de la relation (1). Comme dans ce cas le grandissement est égal à − 1, il est préférable de prendre un objet symétrique (anneau ou croix).
Attention : Ce réglage n'est pas évident à réaliser.
Glisser l'écran avec la souris jusqu'à obtenir une image nette. Glisser le curseur bleu avec la souris pour déterminer les positions des faces d'entrée, de sortie et de l'écran.
La liste de choix permet de sélectionner trois système différents.
Dans ce programme,
la dimension de l'image reste constante. Seul le réglage de la netteté est pris en compte.
Réponses : Les distances focales sont (dans le désordre) 93, 75 et 88 mm.